









Multi-stable morphing structures
From my research experience in Pellegrino's group at Caltech, I realized "actuation complexity" is a big problem for morphing structures with prescribed multiple target shapes. Then, I discovered that multi-stability can reduce the requirement for the number and accuracy of actuators due to the attraction domain of the multi-stable energy landscape, resulting in lighter and more reliable systems. An illustrative video was made by my student Tong Zhou:
https://www.youtube.com/watch?v=GqovKzGVzTk
https://www.bilibili.com/video/BV1ARJrzxEVi?spm_id_from=333.1387.homepage.video_card.click
Now I have developed several types of multi-stable morphing structures:
1. Type 1: prestressed (torsional) springs + rigid mechanisms



Reference papers:
Y. Li, S. Pellegrino*, A theory for the design of multi-stable morphing structures, Journal of the Mechanics and Physics of Solids (2020), https://doi.org/10.1016/j.jmps.2019.103772
Y. Li*, A method of designing a prescribed energy landscape for morphing structures, International Journal of Solids and Structures (2022), https://doi.org/10.1016/j.ijsolstr.2022.111500
Y. Li*, Motion paths finding for multi-degree-of-freedom mechanisms, International Journal of Mechanical Sciences (2020), https://doi.org/10.1016/j.ijmecsci.2020.105709
2. Type 2: assembly of bi-stable unit cells for multi-stable morphing surfaces


Reference papers:
Y. Li*, A. Chandra, C.J. Dorn, R.J. Lang, Reconfigurable surfaces employing linear-rotational and bistable-translational (LRBT) joints, International Journal of Solids and Structures (2020), https://doi.org/10.1016/j.ijsolstr.2020.09.029
P. Zhang#, T. Zhou#, K. Zhang, Y. Luo, Y. Li*, High-stiffness reconfigurable surfaces based on bistable element assembly and bi-compatible truss attachment, Extreme Mechanics Letters (2024), https://doi.org/10.1016/j.eml.2024.102187
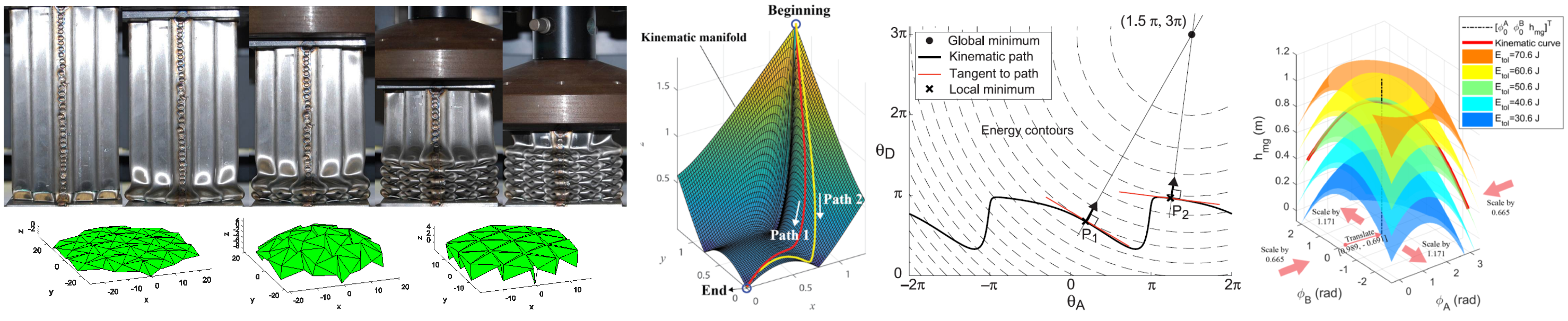
3. Type 3: multi-compatible structures designed by optimization employing multi-compatibility constraints -> found various new multi-stable morphing structures!
(1) 2D multi-stable truss


(2) 2D multi-stable linkage (removing one link from the above truss design) -> multiple 1-DOF kinematic paths separated by energy barriers


(3) 3D multi-stable structures



Reference papers:
L. Ai, S. Yin, W. He, P. Zhang, Y. Li*, Easy-to-actuate multi-compatible truss structures with prescribed reconfiguration, Nature Communications (2024), https://doi.org/10.1038/s41467-024-49210-3
Z. Lin#, L. Ai#, H. Feng, W. He, Y. Li*, Multistable compliant linkages with multiple kinematic paths separated by energy barriers, Extreme Mechanics Letters (2024), https://doi.org/10.1016/j.eml.2024.102175
T. Zhou, C. Huang, Z. Miao, Y. Li*, Intrinsically Multi-Stable Spatial Linkages. Advanced Science (2024), https://doi.org/10.1002/advs.202402127
Z. Miao#, H. Wang#, T. Zhou, K. Liu, H. Ye, Y. Li*, Multi-stable origami with thick panels, Cell Reports Physical Science (2025), https://doi.org/10.1016/j.xcrp.2025.102402
Wang, Heming#, Zhuangzhi Miao#, Jinghui Lv, Yujie Xie, Chong Huang, and Yang Li*. "Bi-stable boxed thick origami-inspired modular and load-carrying structures." Mechanism and Machine Theory 214 (2025): 106114. https://doi.org/10.1016/j.mechmachtheory.2025.106114